




数控机床是机械、液压、电气和计算机技术高度集成的一体化产品,其故障的发生也多数是机械、液压、电气等方面的综合反映。当数控机床产生爬行或振动等故障时,我们也需要分别从这三方面寻找故障原因,只有准确的找到故障原因,才能够精准的排除故障。
一、什么是爬行与振动
在驱动移动部件低速运行过程中,数控机床进给系统会出现移动部件开始时不能启动,启动后又突然作加速运动,而后又停顿,继而又作加速运动,移动部件如此周而复始忽停忽跳、忽慢忽快的运动现象称为爬行。而当其以高速运行时,移动部件又会出现明显的振动。
对于数控机床进给系统产生爬行的原因,一般认为是由于机床运动部件之间润滑不好,导致机床工作台移动时静摩擦阻力增大;当电机驱动时,工作台不能向前运动,使滚珠丝杠产生弹性变形,把电机的能量贮存在变形上;电动机继续驱动,贮存的能量所产的弹性力大于静摩擦力时,机床工作台向前蠕动,周而复始地这样运动,产生了爬行的现象。
事实上这只是其中的一个原因,产生这类故障的原因还可能是机械进给传动链出现了故障,也可能是进给系统电气部分出现了问题,或者是系统参数设置不当的缘故,还可能是机械部分与电气部分的综合故障所造成。
二、爬行与振动的产生机理
1、爬行原理
爬行是一种非常复杂的物理现象,但可以将其简化为直线运动传动系统的力学模型,如图1所示。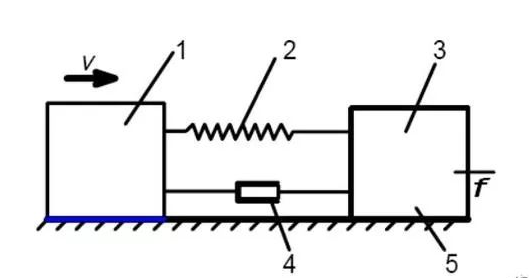
在这个弹性机械系统中,主动件1作等速运动,速度为V。从动件3与它有弹性件2和阻尼器5相连,并沿着固定平面移动。开始时 从动件3相对于平面4静止不动,主动件1向右移动使弹性件2压缩,其弹性力逐渐增大。当弹性力超过从动件3与平面4之间的最大静摩擦力时,从动件3向右快速滑动,此时从动件3所受的摩擦力,由静摩擦力变为动摩擦力。由于静摩擦力小于动摩擦力所以会引起从动件3运动的加速度。当从动件3向右滑动到某个位置时,所受到的动摩擦力和弹性件2向右的张力相等,从动件3将停止下来。然后在经过一段时间,弹性件2重新受压,又强迫从动件3再次向右滑动,运动将这样重复下去。虽然主动件1做匀速运动,而从动件3由于静摩擦力和动摩擦力的交替作用产生了不均匀的间歇运动,即出现爬行现象。
2、振动原理
图2所示为间隙的物理模型,若输出构件的惯量比输入构件惯量小得多时,运动显然被摩擦所控制,当输出被输入驱动时,两构件保持接触并以相同速度一起移动,直到输入构件反向为止。反向后,输出构件保持原状态(静止不动)直到输入构件与另一面接触,间隙消失为止。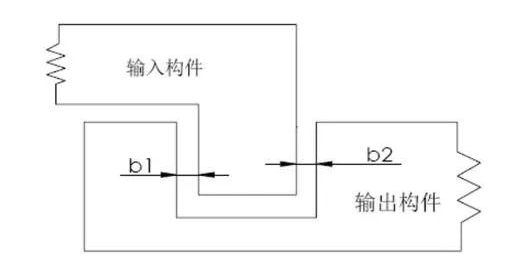
从另一个极端情况来说,若输出构件的摩擦小到可以忽略时,则惯量成为机械链动态特性的决定因素。输入构件越过间隙后保持与输出构件接触,驱动输出构件以相同速度运动,直至输入构件达到最大速度为止,这是输出构件以输入构件所能达到的最大速度恒速滑行,并逐渐与输入构件脱离接触。输入构件反向后,当输出构件已移出间隙b时,将被输入构件另一侧阻止,输出构件将再度承担输入构件的速度。
三、爬行与振动故障的排除
对于数控机床出现的爬行与振动故障,不能急于下结论,而应根据产生故障的可能性,罗列出可能造成数控机床爬行与振动的有关因素,然后逐项排队,逐个因素检查,分析、定位和排除故障。查到哪一处有问题,就将该处的问题加以分析,看看是否是造成故障的主要矛盾,直至将每一个可能产生故障的因素都查到。最后再统筹考虑,提出一个综合性的解决问题方案,将故障排除。
1、对故障发生的部位进行分析
爬行与振动故障通常需要在机械部件和进给伺服系统查找问题。因为数控机床进给系统低速时的爬行现象往往取决于机械传动部件的特性,高速时的振动现象又通常与进给传动链中运动副的预紧力有关。另外,爬行和振动问题是与进给速度密切相关的,因此也要分析进给伺服系统的速度环和系统参数。
2、机械部件故障的检查和排除
造成爬行与振动的原因如果在机械部件,首先要检查导轨副。因为移动部件所受的摩擦阻力主要是来自导轨副,如果导轨副的动、静摩擦系数大,且其差值也大,将容易造成爬行。尽管数控机床的导轨副广泛采用了滚动导轨、静压导轨或塑料导轨,如果调整不好,仍会造成爬行或振动。静压导轨应着重检查静压是否建立;塑料导轨应检查有否杂质或异物阻碍导轨副运动,滚动导轨则应检查预紧是否良好。
导轨副的润滑不好也可能引起爬行问题,有时出现爬行现象仅仅就是导轨副润滑状态不好造成的。这时采用具有防爬作用的导轨润滑油是一种非常有效的措施,这种导轨润滑油中有极性添加剂,能在导轨表面形成一层不易破裂的油膜,从而改善导轨的摩擦特性。
其次,要检查进给传动链。在进给系统中,伺服驱动装置到移动部件之间必定要经过由齿轮、丝杠螺母副或其他传动副所组成的传动链。有效提高这一传动链的扭转和拉压刚度,对于提高运动精度,消除爬行非常有益。引起移动部件爬行的原因之一常常是因为对轴承、丝杠螺母副和丝杠本身的预紧或预拉不理想造成的。传动链太长、传动轴直径偏小、支承和支承座的刚度不够也是引起爬行的不可忽略的因素,因此在检查时也要考虑这些方面是否有缺陷。
另外机械系统连接不良,如联轴器损坏等也可能引起机床的振动和爬行。
3、进给伺服系统故障的检查和排除
如果爬行与振动的故障原因在进给伺服系统,则需要分别检查伺服系统中各有关环节。应检查速度调节器、伺服电机或测速发电机、系统插补精度、系统增益、与位置控制有关的系统参数设定有无错误、速度控制单元上短路棒设定是否正确、增益电位器调整有无偏差以及速度控制单元的线路是否良好等环节,逐项检查分类排除。
对速度调节器的故障,主要检测给定信号、反馈信号和速度调节器本身是否存在问题。给定信号可以通过由位置偏差计数器出来经D/A转换给速度调节器送出的模拟信号VCMD的检测实现,如果就有一个周期的振动信号,那毫无疑问机床振动是正确的,速度调节器这一部分没有问题,而是前级有问题;然后向D/A转换器或偏差计数器去查找问题,如果我们测量结果没有任何振动的周期性的波形,那么问题肯定出在反馈信号和速度调节器。

对测速电机反馈信号故障,由于反馈信号与给定信号对于调节器来说是完全相同的。因此出现了反馈信号的波动,必然引起速度调节器的反方向调节,这样就引起机床的振动。
对电机故障,当机床振动频率与电机转速成一定比率,首先就要检查一下电动机是否有故障,检查它的碳刷、整流子表面状况,以及检查滚珠轴承的润滑情况。
对于脉冲编码器或测速发电机不良的情况,可按下述方法进行测量检查。首先将位置环、速度环断开,手动电动机旋转,观察速度控制单元印制电路板上F/V变换器的电压,如果出现电压突然下跌的波形,则说明反馈部件不良。
测速发电机中常常出现的一个问题是炭刷磨下来的炭粉积存在换向片之间的槽内,造成测速发电机换向片片间短路,一旦出现这样的问题就会引起振动。
一个闭环系统也可能是由于参数设定不合理而引起系统振荡,消除振荡的最佳方法就是减少放大倍数。在FUNAC的系统中调节RV1,逆时针方向转动,这时可以看出立即会明显变好,但由于RV1调节电位器的范围比较小,有时调不过来,只能改变短路棒,也就是切除反馈电阻值,降低整个调节器的放大倍数。
对于外部干扰,若是固定不变的干扰,可检查F/V变换器、电流检测端子以及同步端的波形,检查是否存在干扰,并采取相应的措施。对于偶然性干扰,只有通过有效的屏蔽、可靠的接地等措施,尽可能予以避免。
本文转载自网络,侵删!

